什么是自主行驶机器人? | 入门级网络研讨会
2026/06/15
什么是AGV和AMR?深入解析物流设施中的自动化趋势及新一代自主行驶搬运机器人!
真的有能自主行驶的机器人吗!?
什么是AGV(自动导引车)?
小滨:桥本老师!前几天,我在工厂里发现了正在大显身手的无人搬运车!听说它能在仓库里无人操作地搬运种类繁多且数量庞大的商品!
桥本老师:没错。它被称为AGV(无人搬运车)。这是一种利用磁带等引导方式,能够代替人工将所需零部件运送到指定位置,且不干扰作业的无人搬运车。除了在工厂和仓库内行驶外,它还被用于智能大楼内的配送、安保和清洁工作。

■什么是AGV(自动导引车)?
AGV是“Automation Guided Vehicle”的缩写。JIS D6801标准中将其定义为:“在特定区域内自动行驶,具备运输货物等非人员物品功能的车辆,且不得在《道路交通法》规定的路面上使用。”该车辆遵循磁感应、激光或光学等引导方式,沿预定路线行驶。
■AGV的行驶方式种类
| 引导方式 | 特点 | 示意图 | |
|---|---|---|---|
| 第一代 | 电磁感应 | 在地面安装的金属线中通入微弱的交流电流,通过传感器检测磁场来移动 | 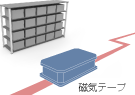 |
| 磁感应 | 在地面安装磁性棒或磁带,通过磁传感器读取信号进行引导。虽然这是日本国内普及率最高的系统,但预计未来将向第2代、第4代系统过渡,或者混合型系统将逐渐普及。 | ||
| 第二代 | 图像识别 | 通过读取地面或天花板上绘制的二维码、AR标记等符号来确定自身位置。可实现高精度定位。 | 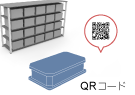 |
| 第三代 | 激光(反射板) | 在建筑物内的墙壁或柱子上安装反射板,通过激光反射推测自身位置并实现自主行驶。需要在车辆行驶范围内的所有区域安装足够数量的反射板。 | 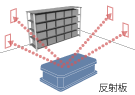 |
| 第四代 | SLAM (自主定位与环境建图) ・视觉SLAM・ 激光雷达SLAM | 利用摄像头、激光等传感器以及编码器和陀螺仪进行自身定位并行驶。无需设置引导线,即可实现自主行驶。常被称为自主行驶搬运机器人(AMR)、非引导行驶方式AGV或新一代AGV。 | 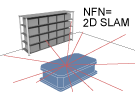 |
・虽然AGV这一称呼已在全球广泛普及,但近年来常将自主行驶型称为AMR以作区分。
桥本老师:AGV(自动导引车)早前就已经投入使用,能够实现精准的自动行驶。但是,它无法自行规划行驶路线,也无法避开障碍物行驶。
什么是AMR(自主移动机器人)?<
小滨:难道没有能够自主规划路线并行驶的机器人吗?
桥本老师:能够自主行驶的机器人被称为AMR(自主行驶搬运机器人)。有时也被称为非导引行驶方式AGV或新一代AGV。
■什么是AMR(自动导引车)?
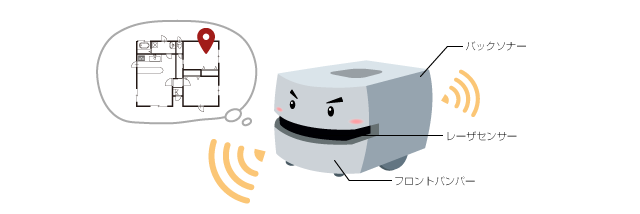
Autonomous (collaborative) Mobile Robot的缩写。无需引导装置,通过搭载的激光雷达测量至墙壁或立柱的距离。该系统采用在构建周围环境地图的同时,基于该地图推算自身位置的方式。JIS D6802《无人搬运车系统——安全规则》中规定:“是指利用其运行区域与人共存、共用的无人搬运车,进行物品搬运和装卸作业的自动搬运系统。”
小滨:随着具备自主行驶能力的AMR(自主行驶搬运机器人)的问世,现在已经能够自动回收和搬运产品及零部件了呢!

AMR(自主行驶搬运机器人)与AGV(自动导引车)有何区别?
小滨:所以它们能搬运的产品和零部件是一样的呢!那么,AMR(自主移动机器人)和AGV(自动导引车)之间有什么区别呢?
桥本老师:AGV(无人搬运车)的作用就像在固定轨道上运行的电车,而AMR(自主移动搬运机器人)则更像是能够与人协作的汽车。如果关注引导方式,就会发现如图所示的区别。听说最近还出现了混合型呢。另外,AMR(自主移动搬运机器人)有时也会与协作机器人组合使用哦!
AMR与AGV的区别
| AGV | AMR | ||
|---|---|---|---|
| 电磁感应 | 图像识别 | SLAM | |
| 磁感应 | 激光导航 | ||
| 精度 | ○ | △ | △ |
| 灵活性 | ✖ | △ | ○ |
| 便捷性 | ✖ | ○ | ○ |
| 可靠性 | ○ | △ | △ |
| 价格 | ○ | △ | △ |
小滨:上次学到的协作机器人在这里也大显身手呢!
※详情请点击此处 ▶ 什么是协作机器人?介绍保障机器人、机械及人员安全的机制
AMR(自动导引运输机器人)和AGV(自动导引车)的关键要素是什么?
小滨:请介绍一下AMR(自主移动机器人)和AGV(自动导引车)的关键要素。
用于探测障碍物的激光SLAM技术
桥本老师:第四代AMR(自主移动机器人)通常采用SLAM技术。它通过摄像头和激光传感器观察周围环境,并结合编码器和陀螺仪来推算自身位置。与SLAM技术相关的产品包括最新款扫地机器人、无人机自动驾驶配送以及火星探测车等。

■什么是SLAM技术?
即SLAM(同步定位与建图)技术。该技术能够同时进行自身定位(Localization)和环境建图(Mapping)。
小滨:原来SLAM技术在日常生活中也有用武之地啊!
视觉SLAM与激光雷达SLAM
桥本老师:SLAM主要分为基于摄像头拍摄图像处理的视觉SLAM,以及基于LiDAR测量的点云数据的LiDAR SLAM。
■视觉SLAM
这是一种通过相机拍摄的图像,同时推断环境地图、场景的三维信息以及相机位置和姿态的技术,其中可使用单目相机、立体相机等。
■LiDAR SLAM
基于LiDAR(激光检测与测距)这种激光传感器(距离传感器)获取的周围点云数据,实时生成二维环境地图,并同时进行地图上的自身位置估计。
桥本老师:LiDAR技术已被应用于自动驾驶、无人机,以及2020年3月发售的iPad Pro中。现在还出现了能够扫描3D空间并轻松创建增强现实(AR)模型的应用程序。
小滨:我最近试用了能模拟摆放家具的增强现实(AR)应用!技术真是日新月异啊!
紧急停止功能
桥本老师:最近的AMR(自主移动机器人)和AGV(自动导引车)已经开发出了从小型到大型的各种型号。对于大型产品和零部件,甚至可以搬运重量超过1吨的物品。
滨酱:真厉害!看来紧急情况下所需的功能也会越来越多呢。
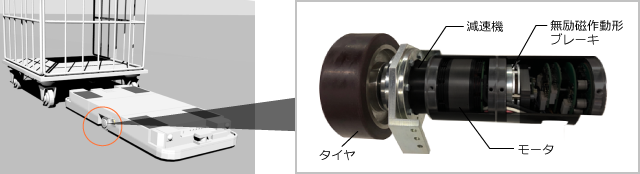
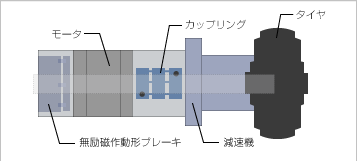
桥本老师:正是如此。因此,无励磁制动器正大显身手。对于昼夜不停运行的AMR和AGV而言,紧急制动系统需要满足各种严苛的要求。
- 制动能力强且制动效果可靠的制动器
- 可靠性高的制动系统
- 使用寿命长的刹车
- 易于维护的制动器
- 可节省电能的制动器
- (以电池驱动的AMR(自主移动机器人)和AGV(自动导引车)为例)

监修・讲师
桥本老师 / 三木普利株式会社
1972年加入三木普利株式会社。作为产品经理,负责市场营销和技术工作,活跃于国内外。 此外,不仅与企业合作,还参与了与大学及专业机构的联合研究。目前还负责技术指导和员工培训。
