什么是振荡? | 入门级网络研讨会
2026/05/07
什么是振荡?
为什么在KTV里扬声器会发出“嗡”的一声!?
滨酱:桥本老师!前几天在KTV里,我一调高麦克风音量,扬声器就发出“嗡”的一声巨响,吓了我一跳。这到底是怎么回事呢?
桥本老师:原来如此。那是“反馈”现象。 “反馈”是音响设备中会发生的一种现象。在机械设计中备受关注的服务电机“振荡现象”,也与这种反馈非常相似。今天我们就来详细学习一下“振荡”吧!
啸叫
现象 桥本老师:首先,让我们来思考一下卡拉OK中的“啸叫”现象。当扬声器和麦克风靠得太近,或者放大器的音量调大时,会发出“哔——”或“嗡——”的声音,这种现象就被称为“啸叫”。
■卡拉OK中回声现象的形成机制
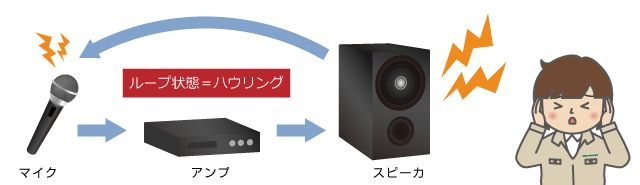
小滨:麦克风、功放、扬声器,声音又被麦克风拾取,就这样不断循环,永远停不下来,是吗?
桥本老师:没错。除非切断电源,或者把麦克风从扬声器上移开,否则这个循环会无休止地持续下去。
啸叫
现象与振荡 桥本老师:工业机械和机器人等设备中使用的伺服电机和步进电机,偶尔也会发生类似啸叫的现象。这是由于驱动装置的指令与结果之间的“反馈控制”信息存在延迟,以及装置的“固有振动频率”等因素所导致的。
在伺服电机中,这种现象被称为“振荡”或“共振”。步进电机通常采用“开环”控制,即仅按指令量移动,因此不会发生“振荡”。不过,在要求高精度的场合,有时也会像伺服电机一样进行反馈控制,因此步进电机也可能发生“振荡”。
为什么会发生振荡?

| 啸叫现象 (将麦克风靠近扬声器时) | 进给螺杆振荡 (伺服/步进电机的反馈控制) | |
|---|---|---|
| ①检测器 | 将 麦克风声音转换为电信号 | 编码器 将角度和转数转换为电信号 |
| ②放大器 | 放大器 :放大电信号 | 伺服 控制器/放大器:将旋转指令与实际动作结果进行比较,放大其差值,并控制电机使其趋近于零 |
| ③驱动部 | 扬声器:利用放 大的电信号使振膜振动,通过空气振动产生声音 | 电机 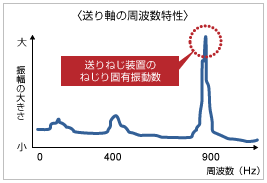 |
| 回路 | 产生的声音被附近的麦克风拾取,返回①,然后重复②、③,形成循环状态 | 电机运行及外扰导致固有振动频率被激发,从而返回①。被送回①的固有振动频率经放大后,形成②、③、①的循环状态 |
小滨:没想到卡拉OK里的“啸叫”和伺服电机、步进电机的“振荡”竟然很相似,真让人惊讶!
桥本老师:在机床、半导体制造设备以及各类生产设备的执行器中,都广泛应用着伺服电机哦。关于其工作原理,我也来介绍一下吧。

进给螺杆机构中伺服电机的振荡现象
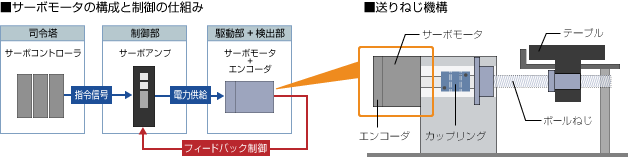
- 通过伺服控制器发出转速、转角和位置指令。
- 伺服放大器根据⑴的指示向伺服电机供电以进行控制。
- 伺服电机根据⑵的指令开始运动,并通过编码器(检测器)将信息反馈给系统,以确认是否与指令一致,从而在持续校正的同时进行跟踪。 ※此时,为了提高速度和位置信息的精度,会逐步提高系统的灵敏度(增益)。 随着灵敏度(增益)的提高,设备的振动(固有振动频率)会通过编码器混入反馈信号中。
- 伺服电机在⑶的固有振动频率下会产生微小的振动。编码器检测到设备的固有振动频率,并通过控制器放大器的灵敏度进一步放大该频率,当电机在此频率下振动时,便会引发“机械共振”,编码器检测到该振动后,形成一个无限循环。
■什么是伺服电机?
指通过电机内部的传感器对运行状态进行监测,从而实现高精度“位置控制”、“速度控制”和“转矩控制”的电机。
■什么是自由振动?
- 一旦施加外力,振动就会持续的现象。
- 振动会随时间衰减。
- 对于同一结构,产生的振动是相同的,这被称为“固有振动频率”。
■什么是强制振动?
- 受周期性外力作用而产生的振动现象。
- 当外力的周期发生变化时,振动频率也会随之改变。
- 当施加的振动频率接近固有频率时,就会发生共振,从而产生非常剧烈的振动。
■什么是共振?
- 当施加的振动频率与“固有振动频率”相同时,会产生远大于施加振动幅度的振动,这种现象称为。
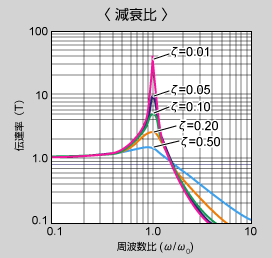
- 共振的幅度由传递率(见右图)表示,并由材料的阻尼比决定。
- 对于金属,会产生比原始振动强数十倍的共振振动;对于橡胶,则会产生比原始振动强数倍的共振振动。
【右图说明】
- ζ<0.01 金属
- ζ=0.02~0.04 金属连续结构
- ζ=0.05 橡胶
- 频率比=激励频率/固有频率
小滨:为了实现高精度和高响应,当提高伺服电机的灵敏度时,反而会激发机械的“固有振动频率”,从而引发“振荡”呢!此外,我还了解到物体的“固有振动频率”会影响方方面面。难道无法提前得知“固有振动频率”吗?
桥本老师:如今,随着分析技术的进步,已经能够对“固有振动数”进行模拟了。简便地来说,可以用以下计算公式求得。
■丝杠系统固有振动频率的简易计算公式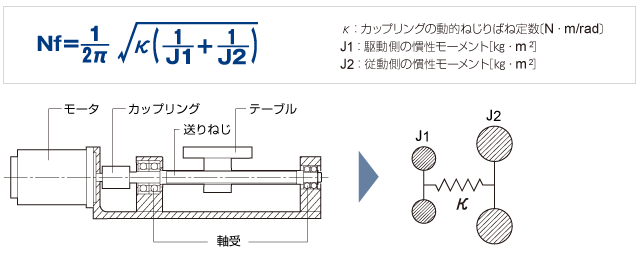
桥本老师:“振荡”或“共振”可能会导致零部件损坏或设备故障,因此必须加以注意。在首次启动设备时,调整伺服系统非常重要。
难道就没有不振荡的方法吗?
小滨:“振荡”和“共振”的原因及关联我已经明白了,但有没有办法防止“振荡”呢?
桥本老师:问得好。首先,我将以刚才提到的伺服电机为例,来讲解如何防止“振荡”。伺服电机发生“振荡”或“共振”的原因是什么来着?
小滨:原因是外扰(这种情况下是机械的固有振动频率)进入了伺服机构的反馈控制回路。
桥本老师:没错!具体的应对方法如下。
防止
振荡的对策对策①:利用伺服电机的自动调谐功能进行调整<
使用伺服电机附带的自动调谐功能进行调整。首次运行时必须执行此操作。如果没有自动调谐功能,则需要在伺服电机的控制面板上进行调整,这需要专业的知识。
对策②:利用驱动器的滤波功能进行控制(若对策①无法解决)为
防止机械系统的固有振动频率进入系统,需掌握该固有振动频率并通过电气手段加以抑制。(陷波滤波器、电流环指令滤波器)
部分伺服电机本身也具备测量该固有振动频率的功能。 (频率响应曲线测量)
对策③:使用
高阻尼橡胶联轴器(StepFlex)通过具有阻尼特性的橡胶联轴器吸收共振时的振动,从而抑制机械及装置的扭转固有振动峰值,进而抑制伺服振荡。(与金属联轴器相比)在进行高精度定位或在含油、高温环境下使用时,需特别注意。
■伺服电机频率性能的比较
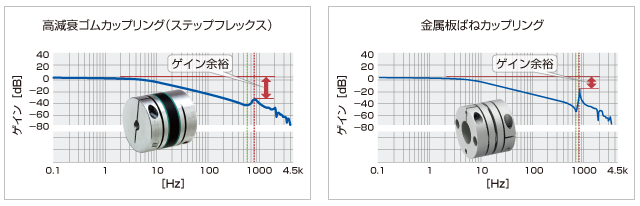
可以推测,在StepFlex橡胶联轴器中,1kHz附近固有频率的峰值已被抑制,因此不易发生振荡。
■伺服电机振荡现象 应对措施视频
小滨:原来只要改变伺服电机本身的结构或联轴器,就能防止“振荡”啊!我想深入学习“
振荡”和“共振”的相关知识,以便在设计和技术开发方面提出各种建议!

监修・讲师
桥本老师 / 三木普利株式会社
1972年加入三木普利株式会社。作为产品经理,负责市场营销和技术工作,活跃于国内外。 此外,不仅与企业合作,还参与了与大学及专业机构的联合研究。目前还负责技术指导和员工培训。
