What Is Oscillation? | Easy-to-Understand Webinar
2026/05/07
What Is Oscillation? Explaining the Causes, Countermeasures, and Relationship with Resonance!
What is oscillation?
Why Do Speakers Make a High-Pitched Whining Sound at Karaoke!?
Hama-chan: Professor Hashimoto! The other day at karaoke, I turned up the microphone volume, and a loud, high-pitched whining sound came from the speakers—it really startled me. What on earth was happening?
Mr. Hashimoto: I see. That’s a phenomenon called “feedback.” Feedback is a phenomenon that occurs in audio equipment. The “oscillation phenomenon” in servo motors, which is a concern in mechanical design, is very similar to this feedback. Today, let’s learn more about “oscillation”!
The Phenomenon of Feedback
Professor Hashimoto: First, let’s think about “feedback” in karaoke. That phenomenon where you hear a “beep” or a “screech” when you bring the speaker and microphone close together or turn up the amplifier’s volume is called “feedback.”
■The Mechanism Behind Feedback in Karaoke
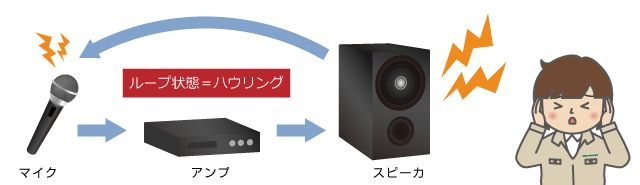
Hama-chan: So the microphone picks up the sound from the amplifier and speakers, and the microphone picks that up again, creating a never-ending loop that just keeps going round and round.
Professor Hashimoto: Exactly. It will go on forever unless you turn off the power or move the microphone away from the speaker.
Feedback Loops
and Oscillation Professor Hashimoto: Servo and stepper motors used in industrial machinery and robots can also occasionally exhibit phenomena similar to feedback loops. This is influenced by factors such as delays in the "feedback control" information—which is the response to the command to move the device—and the device’s "natural frequency."
In the case of servo motors, this is referred to as “oscillation” or “resonance.” Stepper motors generally operate in what’s called “open-loop” control, where they move exactly according to the command, so they don’t typically experience “oscillation.” However, in cases requiring high precision, feedback control similar to that used in servo motors may be employed, so “oscillation” can occur in stepper motors as well.
Why does oscillation occur?

| Feedback (when a microphone is placed near a speaker) | Feed screw oscillation (feedback control of servo and stepper motors) | |
|---|---|---|
| ① Detector | Converts microphone sound into an electrical signal | Encoder: Converts angle and rotation into electrical signals |
| ② Amplifier | Amplifier: Amplifies the electrical signal | Servo Controller/Amplifier: Compares rotation commands with actual results, amplifies the difference, and controls the motor to bring it to zero |
| ③ Drive Unit | Speaker: Uses the amplified electrical signal to vibrate the cone, generating sound through air vibrations | Motor: Rotates the motor using the 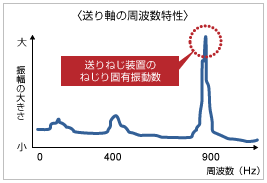 |
| Loop | A nearby microphone picks up the generated sound, returning to ①, then repeating through ② and ③ to form a loop | The motor’s operation and external disturbances stimulate the natural frequency, returning it to ①. The natural frequency returned to ① is amplified, creating a loop through ②, ③, and ① |
Hama-chan: I’m surprised to hear that “feedback” in karaoke is similar to “oscillation” in servo motors and stepper motors!
Professor Hashimoto: Servo motors are used in many applications, such as machine tools, semiconductor manufacturing equipment, and actuators in manufacturing facilities. I’ll also explain how they work.

Oscillation Phenomena in Servo Motors in Lead
Screw Mechanisms
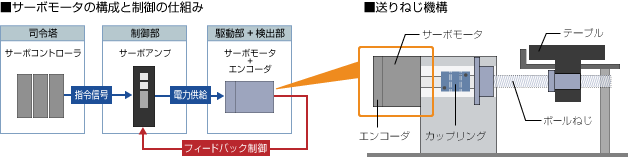
- The servo controller issues commands for rotational speed, rotational angle, and position.
- The servo amplifier controls the servo motor by supplying current to it according to the instructions in (1).
- The servo motor begins to move according to the instructions in (2), and the encoder (sensor) provides feedback to verify whether the motion matches the command, allowing the motor to continuously track the target while making corrections. *Here, the system’s sensitivity (gain) is increased to improve the accuracy of speed and position data. As sensitivity (gain) is increased, vibrations from the equipment (natural frequency) are introduced into the feedback signal via the encoder.
- The servo motor vibrates even slightly at the natural frequency indicated by (3). The encoder detects the system’s natural frequency, which is then further amplified by the controller’s amplifier sensitivity. When the motor vibrates at this natural frequency, “mechanical resonance” occurs, and the encoder detects this, creating an endless loop.
■What is a servo motor?
A motor that enables high-precision "position control," "speed control," and "torque control" by monitoring its operation via sensors located within the motor.
■What is free vibration?
- A phenomenon in which vibrations continue once an external force is applied.
- The vibration decays over time.
- The vibrations generated in the same structure are identical and are referred to as the "natural frequency."
■What is forced vibration?
- A phenomenon in which an object vibrates due to a periodic external force.
- When the frequency of the external force changes, the vibration frequency changes.
- When the applied frequency approaches the natural frequency, resonance occurs, resulting in very strong vibrations.
■What is resonance?
- A phenomenon in which, when a system is subjected to vibrations at the same frequency as its "natural frequency," vibrations occur that are much larger than the amplitude of the applied vibrations.
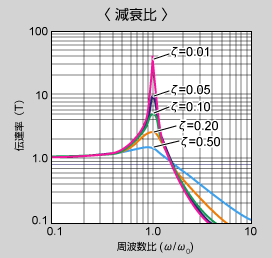
- The magnitude of resonance is represented by the transmission ratio (see figure on the right) and is determined by the material's damping ratio.
- In the case of metal, resonant vibrations occur that are tens of times stronger than the original vibration, while in the case of rubber, they are several times stronger.
[Explanation of the figure on the right]
- ζ < 0.01: Metal
- ζ = 0.02–0.04; continuous metal structure
- ζ=0.05 Rubber
- Frequency ratio = forced frequency / natural frequency
Hama-chan: So, when we increase the sensitivity of a servo motor to achieve high precision and responsiveness, we end up stimulating the machine’s “natural frequency,” which causes “oscillation”! I’ve also learned that an object’s “natural frequency” affects all sorts of things. Is there any way to determine the “natural frequency” in advance?
Professor Hashimoto: Thanks to recent advances in analysis technology, we can now simulate "natural frequencies." You can calculate them using the following simplified formula.
■ Simplified Formula for Calculating the Natural Frequency of a Lead Screw System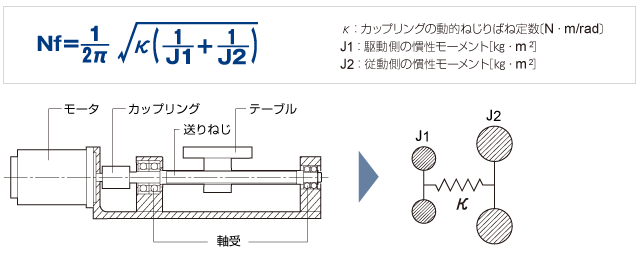
Professor Hashimoto: “Oscillation” and “resonance” can cause component damage or equipment failure, so you need to be careful. It’s important to adjust the servo system when operating the equipment for the first time.
Isn't there a way to prevent it from vibrating?
Hama-chan: I understand the causes and relationship between "oscillation" and "resonance," but isn't there a way to prevent "oscillation"?
Professor Hashimoto: That’s a good question. First, let’s use the servo motor we discussed earlier as an example to explain how to prevent “oscillation.” What was the cause of “oscillation” and “resonance” in the servo motor?
Hama-chan: It’s caused by disturbances entering the servo mechanism’s feedback control (in this case, the machine’s natural frequency).
Professor Hashimoto: Exactly! Here are the specific countermeasures:
Measures to
Prevent Oscillation Measure 1: Adjust using the servo motor’s auto-tuning function <Use the auto-tuning
function included with the servo motor to make adjustments. This must be done when operating the system for the first time. If the servo motor does not have an auto-tuning function, adjustments must be made via the servo motor’s control panel, which requires specialized knowledge.
Countermeasure 2: Control using the driver’s filter function (if Countermeasure 1 does not resolve the issue) Identify the natural
frequency of the mechanical system and suppress it electrically to prevent it from entering the system. (Notch filter, current loop command filter) Some servo motors come equipped
with a function to measure this natural frequency. (Frequency response curve measurement)
Countermeasure 3: Use high-damping rubber couplings
(StepFlex) By using a damping rubber coupling to absorb vibrations during resonance, the peak of the mechanical system’s torsional natural frequency is suppressed, thereby preventing servo oscillation. (Compared to metal couplings) Caution is required when performing high-precision positioning or when operating in environments with oil or high temperatures.
■Comparison of Servo Motor Frequency Performance
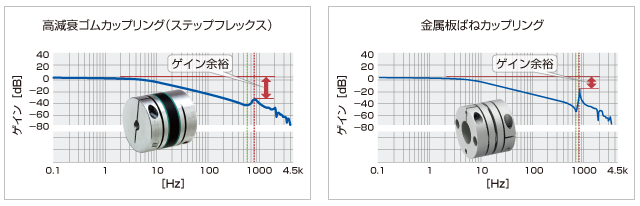
With the StepFlex rubber coupling, it can be assumed that the peak around the natural frequency of 1 kHz is suppressed, making oscillation less likely.
■Video on Countermeasures for Servo Motor Oscillation
Hama-chan: So, by modifying the mechanisms built into the servo motor itself or changing the coupling, we can prevent "oscillation," right
? I want to learn as much as I can about "oscillation" and "resonance" so that I can make various suggestions regarding design and technical development!

Supervisor and Instructor
Mr. Hashimoto / Miki Pulley Co., Ltd.
Joined Miki Pulley Co., Ltd. in 1972. As a product manager, he oversaw marketing and technical operations, playing an active role both domestically and internationally. In addition, he has been involved in joint research projects not only with other companies but also with universities and specialized institutions. He is currently responsible for technical guidance and employee training.
