机器人的种类与结构是什么? | 入门级网络研讨会
2026/06/15
机器人的种类和结构是怎样的?拥有48年技术经验的资深讲师为您详解!
机器人有哪些种类?
什么是机器人?
小滨:桥本老师!前几天我在一本工业杂志上看到了关于工厂自动化的特辑。
得知工厂里有那么多机器人在工作,我真是大吃一惊!请告诉我,现实生活中有哪些机器人在大显身手吧!!
桥本老师:原来如此。那么,今天我们就来学习一下机器人吧。
首先,我们先来确认一下定义。
■机器人的定义
国立研究开发法人新能源·产业技术综合开发机构(NEDO)在《NEDO机器人白皮书2014》(2014年3月)中将机器人定义为“具备传感器、智能与控制系统、驱动系统这三项要素技术的智能化机械系统”。
小滨:原来机器人集成了各种各样的技术啊。
具体来说,有哪些种类呢?
“工业机器人”与“服务机器人”
桥本老师:机器人可以分为“工业机器人”和“服务机器人”两类。用于工业自动化的称为“工业机器人”,用于日常生活辅助等的则称为“服务机器人”。
■机器人的分类
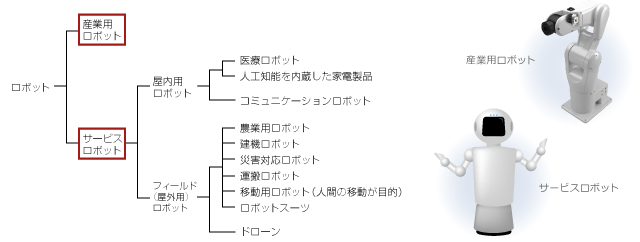
小滨:原来种类这么丰富啊!我前阵子在杂志上看到工厂里工作的机器人,后来才知道那属于“工业机器人”。“工业机器人”擅长进行什么样的作业呢?
“工业机器人”的种类与特点
桥本老师:“工业机器人”各自擅长的作业不同哦。需要根据作业内容选择合适的机器人类型呢。
| 种类 | 轴数 | 用途 | 特点 | 可动范围 | 速度 | 精度 |
|---|---|---|---|---|---|---|
| 直角坐标型机器人 (直交坐标型) 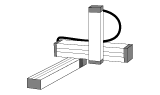 | 2~4 | 零部件 组装 | 由单轴直线运动单元组合而成的结构简单的工业机器人。虽然运动范围仅限于直线,但可以根据单元用途灵活组合。 | - | ○ | ○ |
| 多关节机器人 (垂直多关节型) 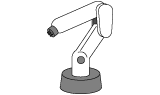 | 4~7 | 焊接、 喷涂、 装配 | 目前应用最广泛的工业机器人。其形状类似人类手臂,自由度高,能够进行绕行动作。通用性极强,已广泛应用于从搬运到焊接、喷涂、组装等各类工序。 | ○ | - | - |
双臂型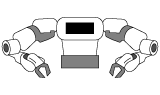 | 2~4 | 搬运检测 组装 | 能够完成单臂机器人无法实现的动作,例如双手搬运箱子等。在节省空间的同时,可进行高难度且精密的作业。 | ○ (灵活) | - | - |
| SCARA机器人 (水平多关节型) 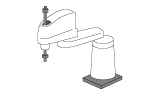 | 4 | 电机 部件的插入 装配等 | 机械臂在水平方向运作的工业机器人。采用4轴结构,上下方向刚性高,同时在水平方向具有柔韧性。广泛应用于电机领域的装配工序(如零件压入作业等)。 | - | ○ | - |
| 并联机器人 (并联连杆) 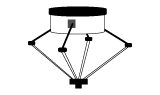 | 4~6 | 高速 拾放 | 采用并联机构(通过并列连杆控制单点运动的方法)的工业机器人。虽然负载能力较小,但擅长高速动作。常安装在传送带等上方,用于对流经的产品进行高速拾取与放置。 | - | ○ | ○ |
小滨:这里有很多我在去年2019年国际机器人展上见过的机器人!原来根据用途不同,发挥作用的机器人也各不相同啊!对了,表格里提到的“轴数”是什么意思呢?
桥本老师:问得好。轴数指的是机器人的关节数量。这是决定机器人运动能力的重要指标。由于这是了解机器人结构时非常重要的术语,我将在下一节进行讲解。
工业机器人是什么结构?
工业机器人的结构与人体相同
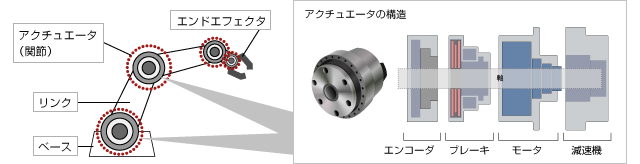
桥本老师:工业机器人由机械臂构成,其基本结构是由关节和连杆组合而成的。用人体来比喻的话,像肘部和肩部那样可以自由弯曲的关节部分就是关节,连接这些关节之间的骨骼部分就是连杆。
小滨:我们之所以能向各个方向活动身体,全靠关节!看来工业机器人也是通过增加轴数(关节),就能让能够自由活动的部位变多了呢。
工业机器人是由多少个轴构成的呢?
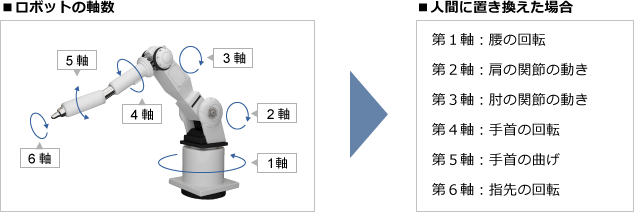
桥本老师:以能够进行复杂动作的垂直多关节机器人为例,通常由6个关节(6轴,6自由度)构成。如果换算成人体的话,情况如下。
滨酱:试着活动一下身体就很容易明白了呢!我想进一步了解
工业机器人是通过什么样的机构来运动的!
要让机器人运行,需要哪些要素?
解析工业机器人的构成要素!
桥本老师:构成机器人的要素大致可分为三类。
1. 机械部分(结构、机构、驱动部件、传感器安装座等)
2. 电子电路(驱动电路、传感器电路、微控制器、计算机电路)
3. 软件(控制、信息处理、判断等)
今天,我们就来详细学习机械要素。
在工业机器人的机械要素中,特别重要的是执行器(关节)、减速机、传感器、紧急制动器和传动机构这5个部分。
■机器人的要素
| 元素 | 目的 | 应用产品 |
|---|---|---|
| 执行器 | 用于使机械臂上下、左右移动及旋转。内置于机器人的关节部位。 | ・伺服电机 ・伺服电机+减速机+编码器+紧急制动器的一体化结构 ・步进电机 |
| 减速机 | 用于获取驱动机器人所需的动力。由于电机单体动力不足,因此与减速机组合以获得更大的扭矩。 | ・摆线减速机 ・波浪齿轮装置 ・行星齿轮装置 |
| 传感器 | 用于检测旋转轴的位置和速度的编码器,以及根据需要检测温度、压力、扭矩、加速度等参数。 | ・编码器 ・压力传感器 ・加速度传感器 ・扭矩传感器 |
| 紧急制动器 | 用于在停电或电源切断时,瞬间停止机器人的运动。 | ・无励磁制动器 |
| 传动机构 | 用于将减速机的输出动力传递至前端。 | ・皮带/同步带 ・齿轮 |
小滨:真没想到工业机器人的小型关节(执行器)里竟然内置了减速机、传感器和制动器!这正是因为每个部件都实现了小型化和轻量化才得以实现的吧。
这让我更想了解工业机器人了!
监修・讲师
桥本老师 / 三木普利株式会社
1972年加入三木普利株式会社。作为产品经理,负责市场营销和技术工作,活跃于国内外。 此外,不仅与企业合作,还参与了与大学及专业机构的联合研究。目前还负责技术指导和员工培训。