로봇의 종류와 구조는? | 알기 쉬운 웹 세미나
2026/06/15
로봇의 종류와 구조는? 48년 경력의 베테랑 강사가 해설합니다!
로봇에는 어떤 종류가 있나요?
로봇이란 무엇일까요?
하마짱: 하시모토 선생님! 얼마 전, 산업 잡지에서 공장 자동화 특집 기사를 봤어요.
공장에서 로봇이 많이 일하고 있다는 걸 알고 깜짝 놀랐어요! 세상에는 어떤 로봇들이 활약하고 있는지 알려주세요!!
하시모토 선생님: 그렇군요. 그럼 오늘은 로봇에 대해 배워보도록 하죠.
우선 정의부터 확인해 볼게요.
■로봇의 정의
국립연구개발법인 신에너지·산업기술종합개발기구(NEDO)의 『NEDO 로봇 백서 2014』(2014년 3월)에서는 로봇을 “센서, 지능·제어계, 구동계라는 3가지 요소 기술을 갖춘 지능화된 기계 시스템”으로 정의하고 있다.
하마짱: 로봇에는 다양한 기술이 통합되어 있군요.
구체적으로 어떤 종류가 있나요?
'산업용 로봇'과 '서비스 로봇'
하시모토 선생님: 로봇은 ‘산업용 로봇’과 ‘서비스 로봇’ 두 가지로 나눌 수 있어. 산업 자동화에 사용하는 것이 ‘산업용 로봇’, 일상생활 지원 등에 사용하는 것이 ‘서비스 로봇’이라고 불리고 있어.
■로봇의 분류
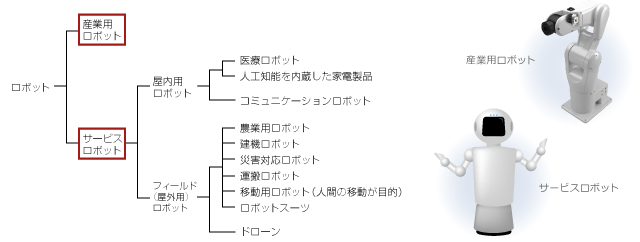
하마짱: 이렇게나 많은 종류가 있군요! 얼마 전 잡지에서 본 공장 내 작업용 로봇은 ‘산업용 로봇’으로 분류된다는 걸 알게 되었어요. ‘산업용 로봇’은 어떤 작업을 잘하나요?
'산업용 로봇'의 종류와 특징
하시모토 선생님: ‘산업용 로봇’은 각각 잘하는 작업이 달라. 작업 내용에 적합한 종류의 로봇을 선택해야 해.
| 종류 | 축 수 | 용도 | 특징 | 가동 범위 | 속도 | 정밀도 |
|---|---|---|---|---|---|---|
| 직교 좌표형 로봇 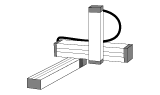 | 2~4 | 부품 조립 | 단축 직동 유닛을 조합한 단순한 구조의 산업용 로봇. 가동 범위는 직선으로 한정되지만, 유닛의 목적에 맞춰 유연하게 조합할 수 있다. | - | ○ | ○ |
| 다관절 로봇 (수직 다관절형) 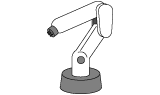 | 4~7 | 용접·도장·조립 | 현재 가장 널리 활용되고 있는 산업용 로봇. 인간의 팔과 같은 형태로 자유도가 높으며, 돌아가는 동작이 가능하다. 범용성이 매우 높아, 이송부터 용접, 도장, 조립에 이르기까지 폭넓은 공정에 도입되고 있다. | ○ | - | - |
쌍팔형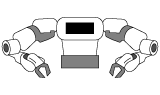 | 2~4 | 핸들링·검사·조립 | 양손으로 상자를 잡는 등, 로봇 팔 하나로는 할 수 없는 동작이 가능하다. 공간을 절약하면서 난이도가 높고 정밀한 작업을 수행할 수 있다. | ○ (유연) | - | - |
| 스카라 로봇 (수평 다관절형) 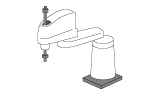 | 4 | 전기 부품 삽입 조립 등 | 수평 방향으로 암이 작동하는 산업용 로봇. 4축 구성으로 상하 방향의 강성이 높으면서도 수평 방향으로는 유연성을 갖추고 있다. 전기 분야에서의 조립 공정(부품 삽입 작업 등)에 폭넓게 채택되고 있다. | - | ○ | - |
| 병렬 로봇 (병렬 링크) 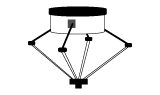 | 4~6 | 고속 픽 앤 플레이스 | 병렬 메커니즘(병렬 링크를 통해 한 지점의 움직임을 제어하는 방법)을 사용한 산업용 로봇. 적재 중량은 적지만, 고속 동작에 강하다. 벨트 컨베이어 위 등에 설치되어, 흘러오는 제품을 고속으로 픽 앤 플레이스하는 데 활용되고 있다. | - | ○ | ○ |
하마짱: 작년 2019 국제 로봇 전시회에서 본 로봇이 많이 있네요! 용도에 따라 활약하는 로봇이 다르군요! 그런데, 표에 있는 ‘축 수’란 무엇인가요?
하시모토 선생님: 좋은 질문이네. 축 수는 로봇의 관절 수를 나타내는 거야. 로봇의 움직임을 결정하는 중요한 지표가 되지. 이건 로봇의 구조를 이해하는 데 있어 매우 중요한 용어니까, 다음 시간에 설명해 줄게.
산업용 로봇은 어떤 구조를 가지고 있나요?
산업용 로봇의 구조는 인간과 같다
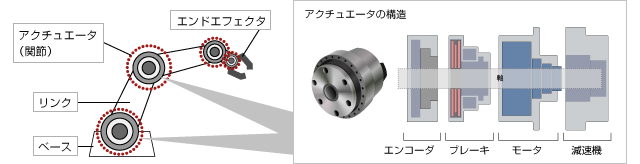
하시모토 선생님: 산업용 로봇은 로봇 팔로 구성되어 있으며, 조인트와 링크의 조합이 기본 구조가 돼. 사람의 몸으로 치면, 팔꿈치나 어깨처럼 자유롭게 구부러지는 관절 부분이 조인트고, 그 사이를 연결하는 뼈 부분이 링크가 되는 거야.
하마짱: 우리가 몸을 여러 방향으로 움직일 수 있는 건 관절 덕분이에요! 산업용 로봇도 축 수(관절)를 늘리면 자유롭게 움직일 수 있는 부분이 늘어나는 거군요.
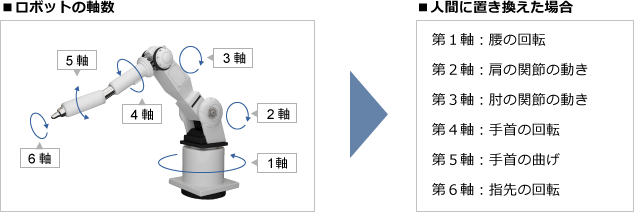
산업용 로봇은 몇 개의 축으로 구성되어 있나요?
하시모토 선생님: 예를 들어, 복잡한 동작이 가능한 수직 다관절 로봇의 경우, 일반적으로 6개의 관절(6축, 자유도 6)로 구성되어 있어. 사람의 경우로 치면 다음과 같아.
하마짱: 몸을 움직여 보면 알기 쉽네요!
산업용 로봇이 어떤 구조로 움직이는지 더 알고 싶어요!
로봇을 작동시키려면 어떤 요소가 필요할까요?
산업용 로봇의 구성 요소를 해설합니다!
하시모토 선생님: 로봇을 구성하는 요소는 크게 3가지로 나눌 수 있어요.
1. 메카(구조, 기구, 구동 부품, 센서 고정부 등)
2. 전자 회로(구동 회로, 센서 회로, 마이크로컨트롤러, 컴퓨터 회로)
3. 소프트웨어(제어, 정보 처리, 판단 등)
오늘은 메카 요소에 대해 자세히 배워보자. 산업용
로봇의 메카 요소 중에서 특히 중요한 것은 액추에이터(관절), 감속기, 센서, 비상 브레이크, 전달 기구의 5가지야.
■로봇의 요소
| 요소 | 목적 | 적용 제품 |
|---|---|---|
| 액추에이터 | 암을 상하·좌우로 이동 및 회전시키기 위함. 로봇의 관절 부분에 내장. | ・서보 모터 ・서보 모터 + 감속기 + 인코더 + 비상 브레이크 일체형 ・스테핑 모터 |
| 감속기 | 로봇을 움직이는 데 필요한 힘을 얻기 위함. 모터 단독으로는 힘이 부족하므로, 감속기와 조합하여 큰 힘을 얻는다. | ・사이클로이드 감속기 ・파동 기어 장치 ・유성 기어 장치 |
| 센서 | 회전축의 위치나 속도를 감지하는 인코더, 온도, 압력, 토크, 가속도 등을 필요에 따라 감지하기 위해. | ・인코더 ・압력 센서 ・가속도 센서 ・토크 센서 |
| 비상 브레이크 | 정전이나 전원 차단 시 로봇의 움직임을 즉시 정지시키기 위함. | ・무자극 작동형 브레이크 |
| 전달 기구 | 감속기의 출력을 전단부에 전달하기 위함. | ・벨트/타이밍 벨트 ・기어(톱니바퀴) |
하마짱: 산업용 로봇의 작은 관절(액추에이터) 안에 감속기도, 센서도, 브레이크도 내장되어 있다니 정말 놀랐어요! 하나하나의 부품이 소형화·경량화되었기 때문에 가능한 일이군요.
산업용 로봇에 대해 더 알고 싶어졌어요!
감수·강사
하시모토 선생님 / 미키 푸리 주식회사
1972년 미키 풀리 주식회사에 입사했다. 제품 매니저로서 마케팅과 기술을 담당하며 국내외를 가리지 않고 활약했다. 또한 기업뿐만 아니라 대학 및 전문 기관과의 공동 연구에도 참여했다. 현재는 기술 지도와 사원 교육도 담당하고 있다.