What Are the Different Types and Structures of Robots? | Easy-to-Understand Webinar
2026/06/15
What Are the Different Types and Structures of Robots? A veteran instructor with 48 years of experience explains!
What kinds of robots are there?
What is a robot?
Hama-chan: Professor Hashimoto! The other day, I saw a special feature on factory automation in an industrial magazine. I was surprised to learn that so many robots are working in factories
! Please tell me what kinds of robots are being used in the real world!!
Professor Hashimoto: I see. Well then, let’s learn about robots today.
First, let’s start by confirming the definition.
■Definition of a Robot
In the "NEDO Robotics White Paper 2014" (March 2014) published by the New Energy and Industrial Technology Development Organization (NEDO), a robot is defined as "an intelligent mechanical system comprising three core technologies: sensors, intelligence and control systems, and drive systems."
Hamachan: So robots incorporate a wide range of technologies.
Specifically, what kinds are there?
"Industrial Robots" and "Service Robots"
Professor Hashimoto: Robots can be divided into two categories: “industrial robots” and “service robots.” Those used for industrial automation are called “industrial robots,” while those used to assist with daily life are called “service robots.”
■Classification of Robots
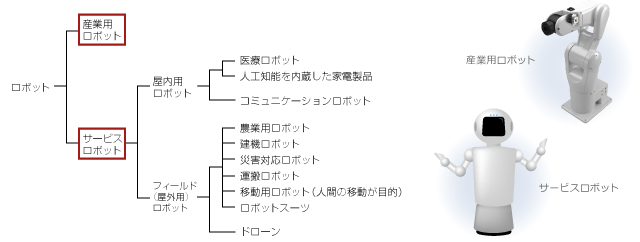
Hama-chan: There are so many different types! I recently read in a magazine that the robots working inside factories are classified as "industrial robots." What kinds of tasks are "industrial robots" good at?
Types and Features of "Industrial Robots"
Professor Hashimoto: "Industrial robots" each have different tasks they excel at. You need to choose the type of robot that’s best suited for the specific task.
| Type | Number of shafts | Application | Features | Range of Motion | Speed | Accuracy |
|---|---|---|---|---|---|---|
| Cartesian-coordinate robots (Cartesian-coordinate type) 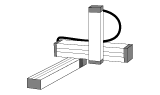 | 2–4 | Parts assembly | Industrial robots featuring a simple mechanism composed of single-axis linear motion units. Although their range of motion is limited to linear movement, the units can be flexibly combined to suit specific applications. | - | ○ | ○ |
| Articulated robots (vertical articulated type) 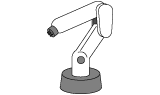 | 4–7 | Welding, Painting, and Assembly | The most widely used industrial robots today. With a shape resembling a human arm, they offer high degrees of freedom and can perform reaching motions. They are extremely versatile and are used in a wide range of processes, from material handling to welding, painting, and assembly. | ○ | - | - |
Dual-arm type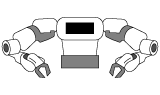 | 2–4 | Handling, Inspection, and Assembly | Capable of movements that a single robotic arm cannot perform, such as holding a box with both hands. Enables high-precision, complex tasks in a compact footprint. | ○ (Flexible) | - | - |
| SCARA Robot (Horizontal Articulated Type) 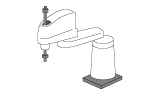 | 4 | Insertion and assembly of electrical components, etc. | An industrial robot whose arm operates horizontally. With a 4-axis configuration, it offers high rigidity in the vertical direction while maintaining flexibility in the horizontal direction. It is widely used in assembly processes within the electronics industry (such as component insertion). | - | ○ | - |
| Parallel Robot (Parallel Link) 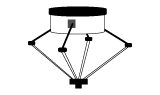 | 4–6 | High-Speed Pick-and-Place | Industrial robots utilizing a parallel mechanism (a method of controlling the movement of a single point via parallel links). While they have a low payload capacity, they excel at high-speed operation. They are often mounted on conveyor belts and used for high-speed pick-and-place operations on products moving along the conveyor. | - | ○ | ○ |
Hama-chan: There are so many robots here that I saw at last year’s 2019 International Robot Exhibition! I see that different robots are used for different applications! By the way, what does “number of axes” mean in the table?
Professor Hashimoto: That’s a great question. The number of axes refers to the number of joints a robot has. It’s a key indicator that determines how the robot moves. Since this is a very important term for understanding robot structure, I’ll explain it next.
What is the structure of an industrial robot?
The structure of industrial robots is similar to that of humans
Professor Hashimoto: Industrial robots are made up of robotic arms, and their basic structure consists of a combination of joints and links. In terms of the human body, the joints—like the elbows and shoulders—that bend freely are the "joints," and the bones connecting them are the "links."
Hama-chan: We can move our bodies in all sorts of directions thanks to our joints! So, industrial robots can also move more freely by increasing the number of axes (joints), right?
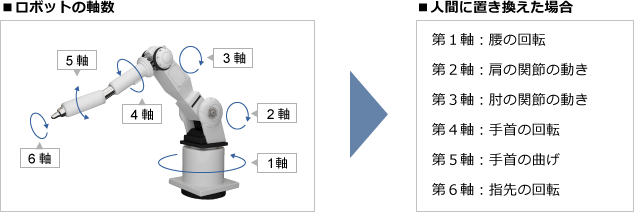
How many axes do industrial robots have?
Professor Hashimoto: For example, vertical multi-joint robots capable of complex movements are generally composed of six joints (6 axes, 6 degrees of freedom). If we compare this to the human body, it looks like this.
Hama-chan: It’s easy to understand when I try moving my body! I want to learn more about the mechanisms
that make industrial robots move!
What elements are needed to operate a robot?
Explaining the Components of Industrial Robots!
Professor Hashimoto: There are three main components that make up a robot.
1. Mechanics (structure, mechanisms, drive components, sensor mounts, etc.)
2. Electronic circuits (drive circuits, sensor circuits, microcontrollers, computer circuits)
3. Software (control, information processing, decision-making, etc.)
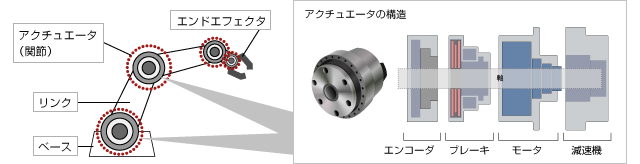
Today, let’s take a closer look at the mechanical components. The five
most important mechanical components in industrial robots are actuators (joints), gearboxes, sensors, emergency brakes, and transmission mechanisms.
■Robotic Components
| Element | Purpose | Products in Which It Is Used |
|---|---|---|
| Actuator | Used to move the arm up and down, left and right, and rotate it. Built into the robot's joints. | ・Servo motor ・Integrated unit consisting of a servo motor, gear reducer, encoder, and emergency brake ・Stepper motor |
| Gearbox | Used to generate the force needed to move the robot. Since a motor alone does not provide sufficient force, it is combined with a reduction gear to generate greater force. | ・Cycloidal reducer ・Wave gear mechanism ・Planetary gear system |
| Sensors | Encoders detect the position and speed of rotating shafts, and other sensors detect temperature, pressure, torque, acceleration, and other parameters as needed. | ・Encoder ・Pressure sensor ・Accelerometer ・Torque sensors |
| Emergency brake | To instantly stop the robot's movement in the event of a power outage or power failure. | ・De-energized brake |
| Transmission mechanism | To transmit the output of the reduction gear to the tip. | ・Belt/Timing belt ・Gears |
Hama-chan: I was amazed to learn that the small joints (actuators) of industrial robots actually contain built-in gearboxes, sensors, and brakes! I guess this is only possible because each individual component has been made smaller and lighter.
Now I want to learn more about industrial robots!
Supervisor and Instructor
Mr. Hashimoto / Miki Pulley Co., Ltd.
Joined Miki Pulley Co., Ltd. in 1972. As a product manager, he oversaw marketing and technical operations, playing an active role both domestically and internationally. In addition, he has been involved in joint research projects not only with other companies but also with universities and specialized institutions. He is currently responsible for technical guidance and employee training.